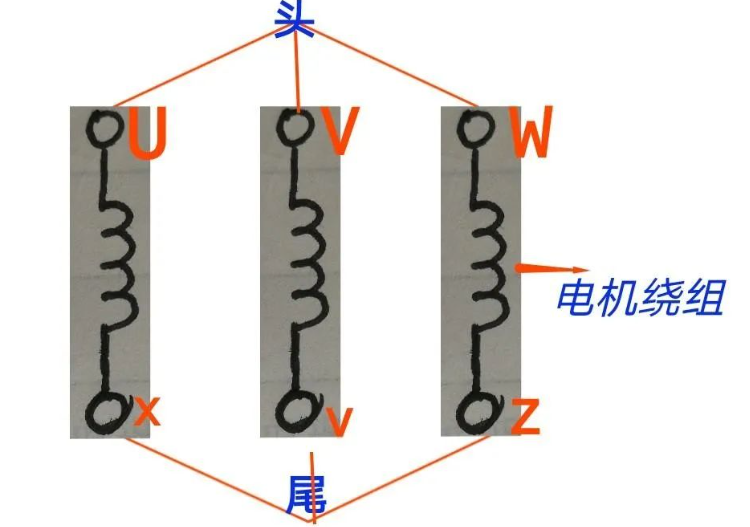
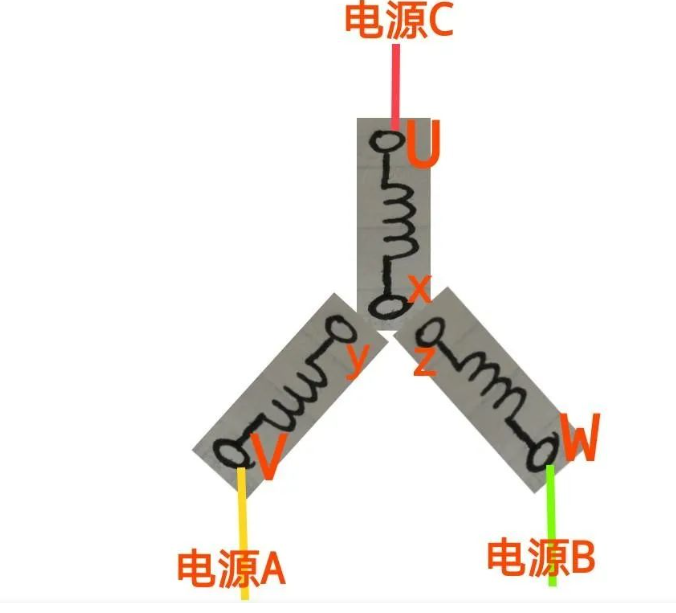
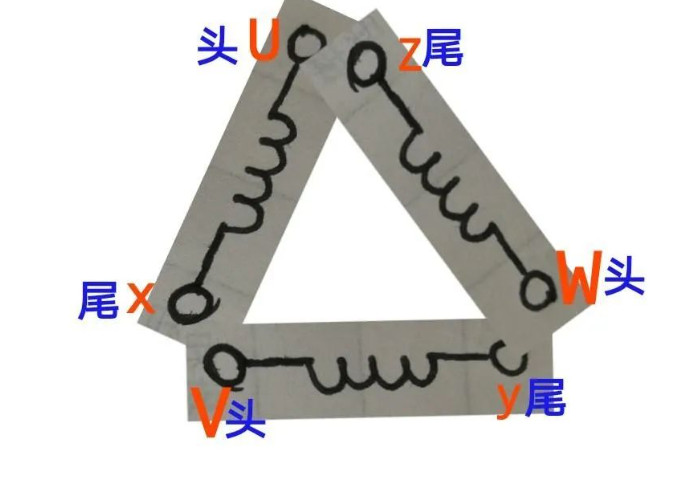
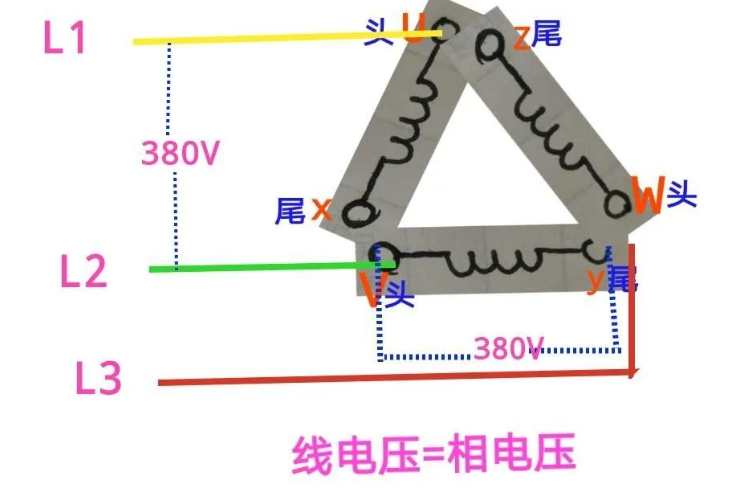
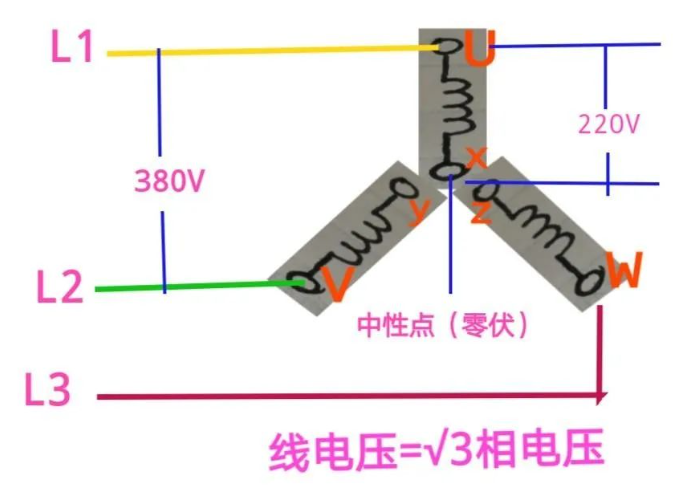
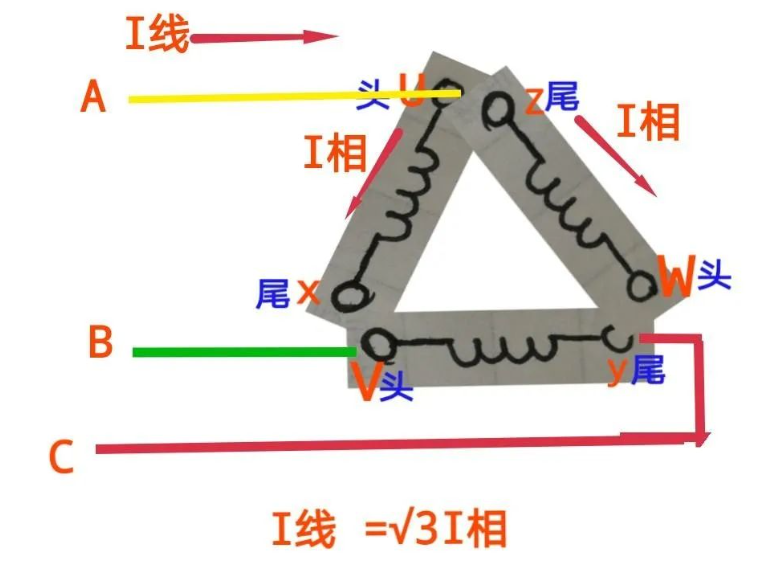
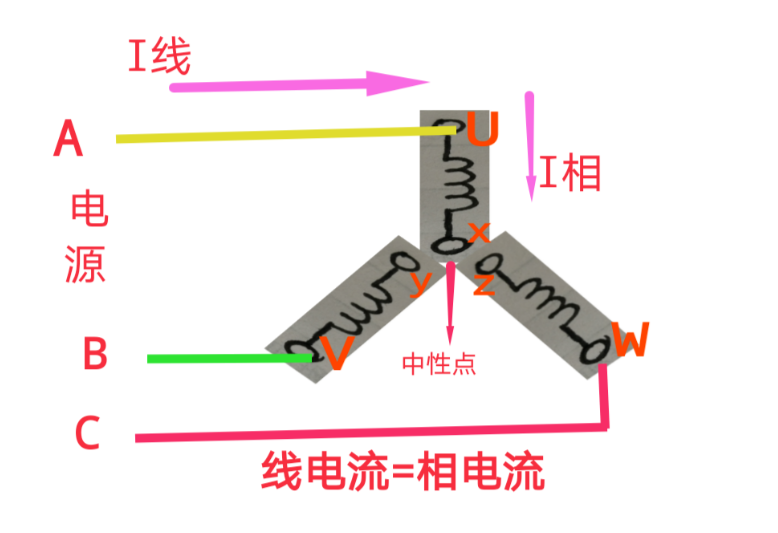
There are only two types of three-phase motor wiring in our factory. One is a star connection and the other is a delta connection. What is the difference between them, let's talk about this topic today. First let's take a look at how they are wired: The AC asynchronous motor we have seen, I believe that most of my friends have seen the structure and coils inside. What needs to be explained here is that no matter the wires inside are ever-changing, there are only six wire ends or three wire ends coming out of the junction box. As shown in the picture above: We finally put them into coil windings and divided them into three windings. Make the corresponding marks and the head and tail respectively (the head and the tail cannot be wrong, it represents the winding direction of the coil). Fasten to the terminals in the junction box. As shown in the figure, connect the three ends of the coil together, and leave three ends to connect to the power supply. This is the star connection method. Looking upside down, it looks a bit like a letter Y, and it also looks like a star, so it is also called a 'Y' connection. We use copper sheets to connect the three terminal terminals, which is the actual motor connection method. In some productions, the three ends are directly hidden in the coil, so the reason why our outlet end is as mentioned above, there are only three terminals. The above picture shows the delta connection method, which is to connect the tail of each of the three windings to the head of the other winding, as shown in the figure Uz, Vx, Wy. Then connect us at these three connections 380 volt power supply In reality it looks like this. Let’s take a look at the characteristics of corner connections and star connections: Delta-connected motor: phase voltage = line voltage, that is, U phase = U line. Phase current = 1/√3 line current, that is, I phase = 1/√3I line. Star-connected motor: phase current = line current, that is, I phase = I line. Phase voltage = 1/√3 line voltage, that is, U phase = 1/√3U line. Each phase winding of the delta-connected motor is generally thinner in terms of material wire diameter due to the small current ratio it bears. But the insulation level is measured according to 380v. Each phase winding of the star-connected motor bears low voltage, so the insulation level is correspondingly lower (considering 220v), but its phase current is as large as the line current, so the current is large, and the wire diameter is selected Slightly thicker to withstand large currents, and has fewer turns than corner motor windings. The starting current of the corner-connected motor is large, but the starting current of the star-connected motor is smaller than it. By calculation, the star-connected motor is 1/3 of the corner-connected motor. Star connection is weaker than delta connection in torque. Therefore, motors below 4kw are generally made into star connection, and motors above 4kw are generally made into angle connection. For angle connection motors, the direct starting current is larger. In order to avoid affecting the power grid, some use the star-delta step-down starting method. Connect to the star type when starting, and then switch to the angle type operation after the speed is suitable. It can only be applied to occasions with light load or low torque requirements. Because after the step-down is started, the power will drop accordingly.






























 XINDA
XINDA