


























Servo Motors - Types, Structure, Operation, Control and Applications
What is a servo motor?
A servo is an electromagnetic device that uses a negative feedback mechanism to convert an electrical signal into controlled motion. Basically, servos behave like actuators, providing precise control over velocity, acceleration, and linear or angular position. It consists of four things: a DC motor, a position sensor, a gear train, and a control circuit. A gear mechanism coupled to the motor provides feedback to the position sensor.
If the motor of the servo is operated by direct current, it is called a DC servo motor, and if it is operated by alternating current, it is called an AC servo motor. The gear of a servo motor is usually made of plastic, but in high power servos it is made of metal.
Servo motors are manufactured by many companies, some of which are Futaba, HITECH, AIRTRONICS and JR Radio. They are identical in manufacture but differ in connector type, wire color, etc. There are many types of servos available in the market, AC, DC, continuous, position and linear servo motors.
Types of Servo Motors
on a rotational basis
1.Position Rotation Servo : The position servo can rotate the shaft in about half a circle. In addition, it has a function to protect the rotation sensor from over rotation. Positioning servos are mainly used in many places such as limbs and robotic arms.
2.Continuous Rotation Servos: Continuous servos are similar in structure to positional servos. However, it can move both clockwise and counterclockwise. These types of servos are used in radar systems and robots.
3.Linear Servos: Again, linear servos are like positioning servos , but with extra gears to adjust the output from circular to back and forth. These types of servos are used in premium aircraft and are rarely found in shops.
Based on running signal
There are also two types of servo motors used which differ in the way they process information and signals.
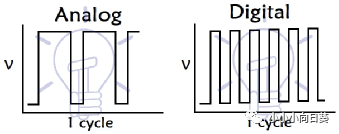
1. Analog servo motor
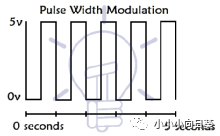
Analog servos operate with a PWM (Pulse Width Modulation) signal. And, the signal range is 4.8V to 6V. In this type of servo, the PWM is off when the servo is at rest. The torque generated at rest makes the launch time inactive. Also, the analog servo can only send 50 pulses per second.
2. Digital servo motor
A small microprocessor digital servo is used to receive the signal and act on high frequency voltage pulses. Digital servos can send 300 pulses per second, which is very high compared to analog servos. With faster pulses, digital servos provide smooth response and consistent torque. Digital servos consume more power than analog servos.
Based on operating power
1. DC servo motor
DC servos are used to provide fast torque response and are also known as permanent magnet DC motors or individually excited DC motors. The reason for providing quick torque response is because torque and flow are decoupled. Therefore, small changes in armature voltage or current can produce significant changes in the position or speed of the shaft. DC servos are the most commonly used servo motors of all types.
2. AC servo motor
There are two types of AC servo motors, one is two-phase and the second is three-phase. Mainly two phase squirrel cage servo motors are used for low power applications. Also, three-phase squirrel-cage servos are used in high-power systems.
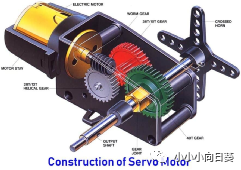
Structure of Servo Motor
Servo motors are DC motors and have the following 5 parts:-
1. Stator winding: This type of winding is wound around the fixed part of the motor. It is also known as the field winding of the motor.
2. Rotor winding: This type of winding is wound around the rotating part of the motor. It is also known as the armature winding of the motor.
3. Bearings: There are two types, font bearings and back bearings , for the movement of the shaft.
4. Shaft: The armature winding is coupled to the iron rod called the shaft of the motor .
5. Encoder : It has a proximity sensor that determines the rotational speed of the motor and the revolutions per minute of the motor.
Servo motor mechanism
It consists of three basic types:
1. Control device
2. Output sensor
3. Feedback system
Servo motors work on the phenomenon of automatic closed-loop systems. This closed loop system requires a controller. The controller consists of a comparator and a feedback path. It has one output and two inputs. In this case, to generate an output signal, a comparator is used to compare the desired reference signal and this output signal is sensed by a sensor. The input signal to the motor is called the feedback signal. According to the feedback signal, the motor starts to work. The comparator signal is called the logic signal of the motor. When the logic difference is high, the motor will turn on for the desired time, and when the logic difference is low, the motor will turn off for the desired time. Basically, a comparator is used to determine if the motor is ON or OFF. The normal operation of the motor can be done with the help of a good controller.
Servo motor control:
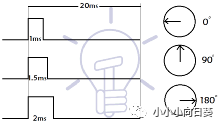
Servo motors can be controlled by the PWM method, i.e. Pulse Width Modulation. They send electrical signals of inconsistent width to the motor. The width pulse varies from 1 ms to 2 ms and is repeated 50 times in one second to transmit it to the servo motor. The width of the pulse controls the angular position of the rotary axis. Among them, three terms are used to represent the control of the servo motor, namely maximum pulse, minimum pulse and repetition rate.
For example , the servo moves with 1 ms pulses to turn the motor towards 0° and 2 ms pulses to turn the motor towards 180°, the pulse widths interchange themselves between the angular positions. Thus, the servo turns 5° with pulses of width 90.1 milliseconds.
There are three wires or leads in each servo motor. Two wires use positive and ground power, while the third wire is used for control signals.
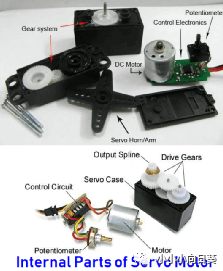
How Servo Motors Work
A servo has a position sensor, a DC motor, a gear system, a control circuit. DC motors run at high speed and low torque while drawing power from the battery. This speed is lower and the torque will be higher than the gear and shaft assembly connected to the DC motor. The position of the shaft is sensed from its determined position by a position sensor and provides information to the control circuit. The signal is decoded by the control circuit of the position sensor and the direction of rotation is processed to obtain the correct position. It requires a DC power supply of 4.8 V to 6 V.
The reduction gearbox is attached to a shaft that reduces the speed of the motor. The output shaft of the reduction gearbox is the same as the motor connected to the encoder or potentiometer. Then connect the output of the encoder to the control circuit. The wires from the servo motor are also connected to the control circuit. The motor is controlled by the microcontroller by sending signals in the form of PWM, the PWM decodes the control circuit to rotate the motor at the desired angle, and the control circuit moves the motor in a clockwise or counterclockwise direction so that the shaft also rotates in the desired direction. The encoder sends a feedback signal to the control circuit. When the motor reaches the desired angle, the control circuit stops the motor accordingly based on the signal received from the encoder.
For example , if the motor is at 30°, and the microcontroller gives the motor an angle of 60°, the control circuit rotates the motor in a clockwise direction. When the motor reaches 60°, the encoder sends a signal to the control circuit to stop the motor.
Application of Servo Motor
Here are some applications for controlling speed when over or over spinning the servo:
They are used to control the positioning and movement of elevators in radio-controlled aircraft
They play an important role in the robotic information of the robot due to their smooth switching and accurate positioning.
They are used in hydraulic systems to maintain hydraulic fluids in the aerospace industry.
In radio controlled toys, these are also used.
They are used to extend or replay disc trays in electronic devices such as DVD or Blu-ray Disc players.
They are used to maintain the speed of vehicles in the automotive industry.
Advantages and disadvantages of servo motors
Advantage:
When we put a heavy load on the motor, the driver will increase the current to the motor coils as it tries to spin the motor.
In servo motors, high speed operation will be possible.
Disadvantages:
The cost will be higher.
Servo motors are not suitable for precise control of rotation, because the servo motor tries to rotate according to the command pulse, but lags behind.
 XINDA
XINDA