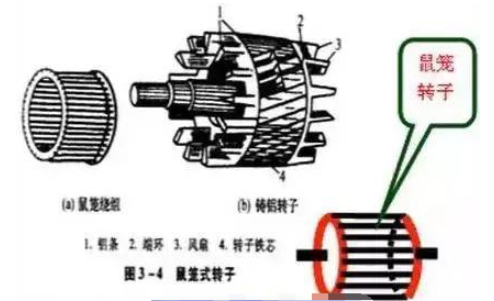
The three-phase asynchronous motor is composed of two parts: the stator and the rotor. The stator is the fixed part of the motor and is used to generate a rotating magnetic field. It is mainly composed of the stator core, stator windings, base and other components. The rotor is the rotating part of the motor, consisting of the rotor core, rotor windings, rotating shaft and other components. Its main function is to obtain rotational torque under the action of the rotating magnetic field. The difference between wound motors and squirrel cage motors Rotors are divided into two types: squirrel-cage rotors and wound rotors according to different structures: 1. Squirrel cage rotor The rotor winding consists of multiple guide bars inserted into the rotor slots and two circular end rings. If the rotor core is removed, the entire winding looks like a squirrel cage, so it is called cage winding. Small and medium-sized rotors generally use cast aluminum. For motors above 100KW, they are welded with copper bars and copper end rings. The number of rotor phases of a squirrel-cage asynchronous motor is the number of conductors on the squirrel-cage rotor, and the number of turns per phase is equal to 1/2 turns. The rotor winding does not need to be insulated from the ground. The number of rotor pole pairs is obtained by the asynchronous magnetomotive force of the stator winding. Therefore, it is always equal to the number of pole pairs of the stator winding and has nothing to do with the number of conductors of the squirrel cage rotor. Squirrel-cage rotor, as shown in Figure 3-4. This rotor is installed in the rotor core slot with copper bars, and the two ends are welded with end rings. It is shaped like a squirrel cage.
Common starting methods for squirrel cage asynchronous motors: direct start, step-down start, variable frequency start or soft starter start. 2. Wound rotor The windings of the wound rotor are similar to the stator windings. Medium-sized motors mostly use double-layer windings. The three-phase windings are connected in a star shape, and the three terminal wires are connected to three copper (or steel) slip rings mounted on the rotating shaft through the brushes. Connected to external circuit. The number of phases and pole pairs of the rotor winding of a wire-wound asynchronous motor is always the same as that of the stator. The number of turns per phase is relatively large, the induced potential is large, and the rotor winding needs to be insulated from the ground.
Common starting methods for wound asynchronous motors: When starting a wound asynchronous motor, direct starting, rotor string resistance starting, or frequency-sensitive rheostat starting are used. There is no need to use variable frequency starter or soft starter to start. The squirrel cage motor has a simple structure and low price. The winding motor has a complex structure and high price. Since the squirrel cage motor has a simple structure and low price, it is relatively simple to control the motor operation. The winding motor has a complex structure, high price, relatively complex motor operation control, and its applications are relatively few. However, the wound motor is mainly used in heavy loads due to its large starting and running torque.




























 XINDA
XINDA