With the development of science and technology, more and more motors have been invented, and different motors have their own advantages in different fields. Stepper motors are widely used in ATM machines, inkjet printers, cutting plotters, photo machines, spraying equipment, medical instruments and equipment, computer peripherals and mass storage equipment, precision instruments, industrial control systems, office automation, robots and other fields, especially suitable for Applications that require smooth operation, low noise, fast response, long service life, and high output torque.
Stepping motor is also called pulse motor, based on the most basic principle of electromagnet, it is a kind of electromagnet that can rotate freely, and its action principle is to rely on the change of air gap permeance to generate electromagnetic torque. Its original model originated between 1830 and 1860. Around 1870, attempts to control were started and applied to the electrode delivery mechanism of hydrogen arc lamps. This is considered the original stepper motor. In 1923, James Weir French invented the three-phase variable reluctance (Variable reluctance), which is the predecessor of the stepper motor. At the beginning of the 20th century, stepper motors were widely used in automatic telephone exchanges. As Western capitalist powers scrambled for colonies, stepper motors found widespread use in stand-alone systems such as ships and aircraft that lacked AC power. The invention of the transistor in the late 1950s was also gradually applied to stepping motors, making digital control easier. After the 1980s, due to the appearance of cheap microcomputers with a multi-functional attitude, the control methods of stepper motors became more flexible and diverse.
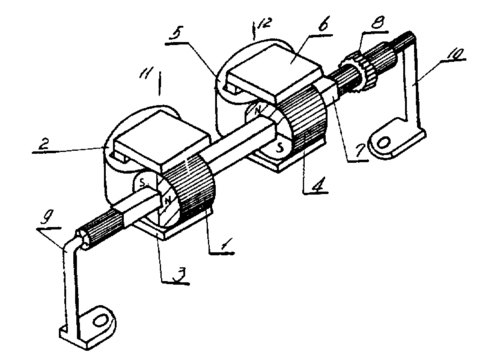
The rotation of the stepper motor is to generate a rotating electromagnetic field on the stator through the electronic commutation of the stepper motor driver. Through the teeth of the stator and the rotor where the reluctance is the smallest, the rotor is attracted to rotate with the rotating electromagnetic field of the stator. Because electrification produces magnetic force, there will be no electricity on the rotor, and there will be magnetic force with permanent magnets. After the stepping motor is powered on, the magnetic force on the stator and the rotor will attract each other, and the stepping motor will start to rotate.
Magnets can provide a good driving force for stepper motors, so the difference in magnets also determines the quality of stepper motors. Generally, the higher the performance of the magnet, the faster the speed of the stepper motor and the more stable the body, but the magnetic field After the driving force reaches a certain value, the extra magnetic field will have less and less influence on the stepping motor. Therefore, choosing a magnet with a suitable magnetic force can improve the efficiency of the stepping motor as much as possible and reduce unnecessary waste. In particular, NdFeB is a rare earth material, and its high price is the bulk of the cost of stepping motors.




























 XINDA
XINDA