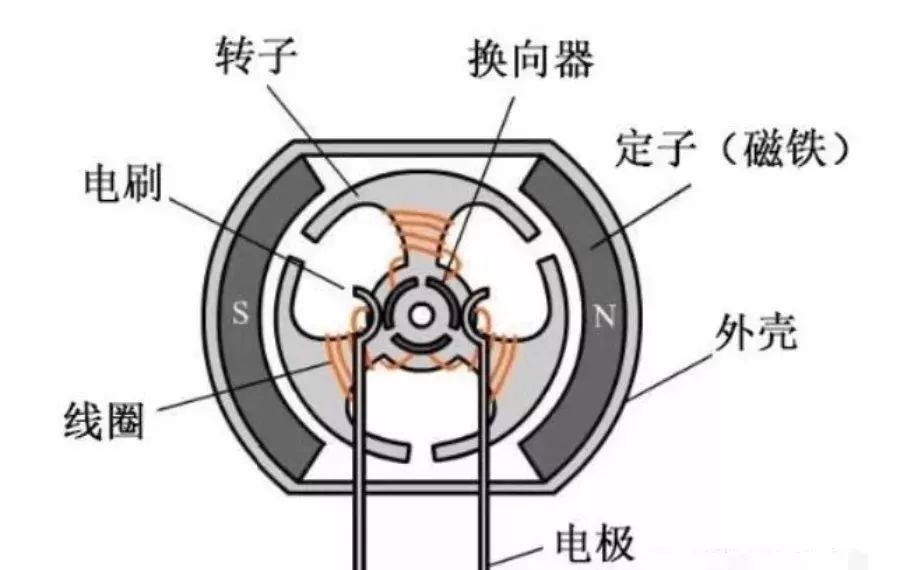
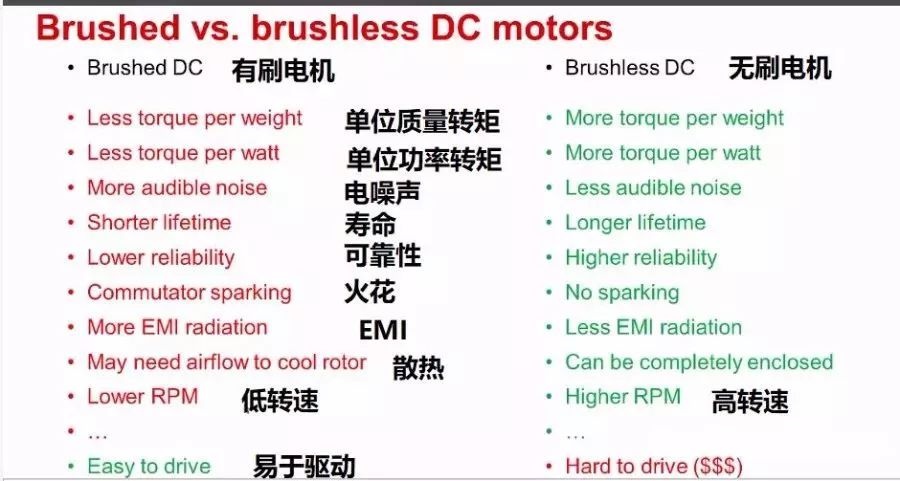
Working principle of brushed motor The brushed motor is the first type of motor that everyone came into contact with. The motor was introduced in the physics class in middle school and it was also used as a model to show. The main structure of the brushed motor is the stator + rotor + brushes, and the rotational torque is obtained through the rotating magnetic field, thereby outputting kinetic energy. The brushes and the commutator are in constant contact and friction, and play the role of conduction and commutation during rotation. The brushed motor adopts mechanical commutation, the magnetic pole does not move, and the coil rotates. When the motor is working, the coil and the commutator rotate, the magnetic steel and the carbon brush do not rotate, and the alternating change of the direction of the coil current is completed by the commutator and the brush that rotate with the motor. In a brushed motor, this process is to arrange the two power input ends of each group of coils into a ring in turn, and separate them with insulating materials to form a cylinder-like thing, which is integrated with the motor shaft. Through two small pillars (carbon brushes) made of carbon elements, under the action of spring pressure, from two specific fixed positions, press the two points on the upper coil power input annular cylinder to energize a group of coils. As the motor rotates, different coils or different poles of the same coil are energized at different times, so that the NS pole of the magnetic field generated by the coil and the NS pole of the nearest permanent magnet stator have a suitable angle difference, and the opposite sex of the magnetic field attracts and the same sex Repel each other, generate power, and push the motor to rotate. The carbon electrode slides on the coil terminal, like a brush brushing on the surface of an object, so it is called a carbon "brush". Sliding against each other will rub the carbon brush, causing loss, and the carbon brush needs to be replaced regularly; the carbon brush and the coil terminal are alternately switched on and off, and electric sparks will occur, which will generate electromagnetic damage and interfere with electronic equipment. Working principle of brushless motor In brushless motors, the work of commutation is done by the control circuit in the controller (generally Hall sensor + controller, more advanced technology is magnetic encoder). The brushless motor adopts electronic commutation, the coil does not move, and the magnetic pole rotates. The brushless motor uses a set of electronic equipment to sense the position of the poles of the permanent magnet through the Hall element. According to this perception, the electronic circuit is used to switch the direction of the current in the coil in a timely manner to ensure that the magnetic force in the correct direction is generated to drive the motor. . Eliminates the disadvantages of brushed motors. These circuits are the motor controllers. The controller of the brushless motor can also realize some functions that the brushed motor cannot realize, such as adjusting the switching angle of the power supply, braking the motor, causing the motor to reverse, locking the motor, and using the brake signal to stop power supply to the motor. Now the electronic alarm lock of the battery car makes full use of these functions. The brushless DC motor consists of a motor body and a driver, and is a typical mechatronic product. Since the brushless DC motor operates in a self-controlled manner, it does not add an additional starting winding to the rotor like a synchronous motor with heavy load under variable frequency speed regulation, nor does it cause oscillation and out of step when the load changes suddenly. The difference between brush motor and brushless motor speed regulation In fact, the control of the two motors is voltage regulation, but because the brushless DC uses electronic commutation, it can only be realized with digital control, while the brushed DC is commutated through carbon brushes, using silicon controlled rectifiers, etc. Traditional analog circuits can be controlled and are relatively simple. 1. The speed regulation process of the brushed motor is to adjust the voltage of the motor power supply. The adjusted voltage and current are converted by the commutator and the brush to change the strength of the magnetic field generated by the electrodes to achieve the purpose of changing the speed. This process is called variable voltage speed regulation. 2. The speed regulation process of the brushless motor is that the voltage of the power supply of the motor remains unchanged, the control signal of the ESC is changed, and the switching rate of the high-power MOS tube is changed through the microprocessor to realize the change of the speed. This process is called frequency conversion speed regulation. performance difference An introduction video from TI about the comparison of brushed motors and brushless motors, as shown in the figure below, is very complete. 1. Brushed motor has simple structure, long development time and mature technology As early as the 19th century, when the motor was born, the practical motor produced was a brushless form, that is, an AC squirrel-cage asynchronous motor, which was widely used after the generation of alternating current. However, asynchronous motors have many insurmountable defects, so that the development of motor technology is slow. In particular, brushless DC motors have not been able to be put into commercial operation. With the rapid development of electronic technology, they have not been put into commercial operation until recent years. In essence, they still belong to the category of AC motors. Shortly after the birth of brushless motors, brushed DC motors were invented. Due to the simple structure of the DC brush motor, easy production and processing, convenient maintenance, and easy control; the DC motor also has the characteristics of fast response, large starting torque, and the ability to provide rated torque from zero speed to rated speed. has been widely used. 2. DC brushed motor has fast response speed and large starting torque The DC brushed motor has fast starting response speed, large starting torque, stable speed change, almost no vibration from zero to maximum speed, and can drive a larger load when starting. The brushless motor has a large starting resistance (inductive reactance), so the power factor is small, the starting torque is relatively small, there is a buzzing sound when starting, accompanied by strong vibration, and the load is small when starting. 3. The DC brushed motor runs smoothly, and the starting and braking effects are good The brushed motor adjusts the speed through voltage regulation, so the starting and braking are stable, and it is also stable when running at a constant speed. Brushless motors are usually controlled by digital frequency conversion, which first converts AC to DC, and then DC to AC, and controls the speed through frequency changes. Therefore, brushless motors do not run smoothly when starting and braking, and the vibration is large. Only when the speed is constant will be stable. 4. High control precision of DC brushed motor DC brushed motors are usually used together with gearboxes and encoders, so that the output power of the motor is greater, and the control accuracy is higher. The control accuracy can reach 0.01mm, and the moving parts can be stopped almost anywhere you want. All precision machine tools use DC motors to control precision. Because the brushless motor is not stable when starting and braking, the moving parts will stop at different positions every time, and it must be stopped at the desired position through positioning pins or stoppers. 5. DC brushed motor has low cost and easy maintenance Due to the simple structure of the DC brush motor, low production cost, many manufacturers, and relatively mature technology, it is widely used, such as factories, processing machine tools, precision instruments, etc. If the motor fails, you only need to replace the carbon brush. Carbon brushes only cost a few dollars, very cheap. The brushless motor technology is immature, the price is high, and the application range is limited. It should be mainly used in constant-speed equipment, such as inverter air conditioners and refrigerators. If the brushless motor is damaged, it can only be replaced. 6. Brushless, low interference The brushless motor removes the brush, and the most direct change is that there is no electric spark generated when the brushed motor is running, which greatly reduces the interference of electric sparks on remote control radio equipment. 7. Low noise and smooth operation There are no brushes in the brushless motor, the friction force is greatly reduced during operation, the operation is smooth, and the noise will be much lower. This advantage is a huge support for the stability of the model operation. 8. Long life, low maintenance cost Without the brush, the wear of the brushless motor is mainly on the bearing. From a mechanical point of view, the brushless motor is almost a maintenance-free motor. When necessary, only some dust removal maintenance is required. Brushless motor control principle Motor drive control is to control the rotation or stop of the motor, and the speed of rotation. The motor drive control part is also called electronic speed controller, referred to as ESC, and electronic speed controller (ESC) in English. ESCs correspond to different motors, including brushless ESCs and brushed ESCs. The permanent magnet of the brushed motor is fixed, the coil is wound on the rotor, and the direction of the magnetic field is changed through a brush and the commutator to keep the rotor continuously rotating. Brushless motor, as the name suggests, this kind of motor does not have so-called brushes and commutators. Its rotor is a permanent magnet, and the coil is fixed. It is directly connected to an external power supply. The problem is that the direction of the magnetic field of the coil How to change it? In fact, an electronic governor is needed outside the brushless motor. To put it bluntly, this governor is a motor drive. It changes the direction of the internal current of the fixed coil at any time to ensure the connection between it and the permanent magnet. The acting forces are mutually repulsive, and continuous rotation is continued. The brush motor can work without an ESC, and it can work by directly supplying electricity to the motor, but this cannot control the speed of the motor. The brushless motor must have an ESC to work, otherwise it cannot rotate. The DC power must be converted into three-phase AC power through the brushless ESC, and then transmitted to the brushless motor to rotate. The earliest ESCs were not like the current ESCs. They were all brushed ESCs. Speaking of this, you may have to ask, what is a brushed ESC, and what is the difference from the current brushless ESCs. In fact, the difference is quite big. Both brushed ESC and brushless ESC are based on the motor. Now the rotor of the motor, that is, the part that can rotate is all magnet blocks, and the coil is the stator that does not rotate, because There is no carbon brush in the middle, this is a brushless motor. As for the brushed motor, as the name suggests, it has carbon brushes, so it is a brushed motor. Like the motors used by our usual children for 10 or 20 yuan remote control cars, they are brushed motors. ESCs are brushed ESCs and brushless ESCs named after these two motors. From a professional point of view, the output of brushed ESC is DC, and the output of brushless ESC is three-phase AC. Direct current is the electricity stored in our batteries. There are positive and negative poles. We use 220V at home, and the power supply used for mobile phone chargers or computers is AC. Alternating current has a certain frequency. In layman's terms, it means that the positive and negative are exchanged back and forth on a line; the direct current is that the positive pole is the positive pole, and the negative pole is the negative pole. AC and DC are clear, so what is "three-phase electricity"? Theoretically speaking, three-phase alternating current is a form of transmission of electricity, referred to as three-phase electricity. A power supply consisting of an AC potential of 1 degree. In layman's terms, it is the three-phase AC power in our home, except for the voltage, frequency, and driving angle, everything else is the same. Now you know about three-phase power and DC power. Brushless ESC, the input is DC, and the voltage is stabilized by a filter capacitor. Then it is divided into two lines, one is used by the BEC of the ESC, the BEC is used to supply power to the receiver and the ESC's own microcontroller, the power line output to the receiver is the red line and black line on the signal line, and the other is to intervene in the MOS The tube is used, here, the ESC is powered on, the microcontroller starts to start, drives the MOS tube to vibrate, and makes the motor make a beeping sound. Standby after startup, some ESCs have a throttle calibration function, before entering the standby mode, it will monitor whether the throttle position is high, low or in the middle. , if it is low, it will enter the normal working state. After everything is ready, the microcontroller in the ESC will determine the output voltage and frequency, as well as the driving direction and timing according to the signal on the PWM signal line to drive the speed and direction of the motor. This is the principle of brushless ESC. When the drive motor is running, there are 3 groups of MOS tubes working in the ESC, each group has 2 poles, one controls the positive output, and the other controls the negative output. In this way, alternating current is formed. Similarly, the three groups work in this way, and their frequency is 8000HZ. Speaking of this, the brushless ESC is also equivalent to the frequency converter or speed controller used on the motor in a factory. The input of the ESC is DC, usually powered by a lithium battery. The output is three-phase AC, which can directly drive the motor. In addition, the brushless electronic speed controller of the aircraft model also has three signal input lines, which input PWM signals to control the speed of the motor. For aircraft models, especially quadcopters, due to their particularity, special aircraft model ESCs are required. So why do you need a special ESC on the quadcopter? What's so special about it? The quadcopter has four propellers, which are opposite to each other in a cross structure. The steering of the paddle is divided into forward and reverse, which can offset the spin problem caused by the rotation of a single blade. The diameter of each paddle is very small, and the centrifugal force when the four paddles rotate is dispersed. Unlike the propellers of straight planes, there is only one inertial centrifugal force that can generate concentrated centrifugal force to form a gyroscopic nature, so that the fuselage is not easy to roll over quickly. Therefore, the update frequency of the commonly used steering gear control signal is very low. In order to be able to quickly respond to the drift caused by attitude changes, the four-axis needs an ESC with a high response speed. The update speed of the conventional PPM ESC is only about 50Hz, which cannot meet the speed required for this control, and the PPM ESC has a built-in MCU. PID stable speed control can provide smooth speed change characteristics for conventional aircraft models, but it is not suitable for four-axis, which needs fast response to motor speed changes. With high-speed dedicated ESC, the IIC bus interface transmits control signals, which can achieve hundreds of thousands of motor speed changes per second, and the attitude can be kept stable at all times during four-axis flight. Even if it is suddenly impacted by external force, it is still safe and sound.






























 XINDA
XINDA