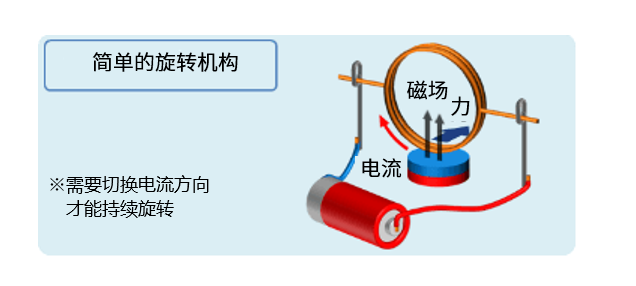
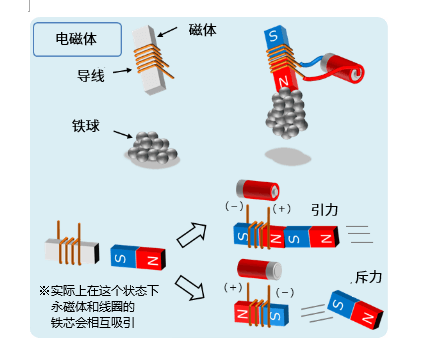
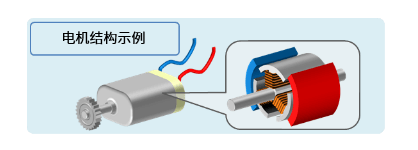
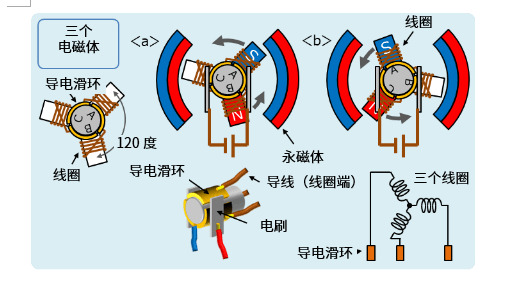
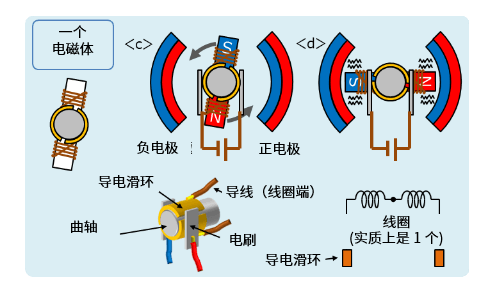
What is a motor? In a broad sense, "motor (mortor)" is a kind of power device, such as motor racing and other English terms related to automobiles. Motor". So how does an electric motor (motor) convert electrical energy into mechanical energy? The motor uses electrical energy to form an electromagnet, and uses the interaction (attraction and repulsion) of the magnets to generate mechanical energy. There is another way of explaining, perhaps this explanation is more general, and it can also be said that the motor "uses the force of the current-carrying conductor in the magnetic field". This is related to "Fleming's Left Hand Rule". We can use the following schematic diagram of a simple rotating mechanism to understand this principle in detail (note: the direction of the current needs to be switched to continue to rotate). However, its structure is slightly different from the actual motor structure that will be introduced later, so here I will briefly explain the "application of electromagnets". Electromagnets are made by winding wire around a magnetic material such as iron. Of course, nothing happens just by winding it like this, but when current flows through the wire, the magnetic material takes on the properties of a magnet and attracts other magnets (iron, etc.). Also, since the magnetic poles can be changed by changing the direction of the current, if a magnet is placed opposite to another magnet, the force exerted on the magnet can be switched between attractive and repulsive (see figure below). The so-called motor is based on the characteristics of this electromagnet and uses electric energy to achieve rotational motion (note: there are also motors that do linear motion such as linear motors). Now, I believe you have understood that mechanical energy is obtained through the attraction and repulsion of magnets, so how is continuous rotational motion achieved? Regarding this point, just look at works such as wireless remote control cars and electronic production The structure of the motor used in is actually very easy to understand. The principle of motor rotation Let's take the basic brushed motor as an example to understand the rotation principle of the motor. The structure of this motor is shown in the "three electromagnets" diagram, which consists of coils and conductive slip rings arranged mechanically at intervals of 120 degrees, two brushes arranged between the conductive slip rings, and permanent magnets. Such motors are called "brush motors", "commutator motors" or "commutator motors" because of the brushes. In order to make it easier for everyone to understand why it is such a 120-degree angle structure, we first use a schematic diagram of an electromagnet to illustrate its rotation principle. In the "one electromagnet" diagram, there are two brushes, one connected to the positive electrode and one connected to the negative electrode. When a conductive slip ring is gripped by a brush as shown, a voltage is applied to the coil connected to the slip ring, causing current to flow. This conductive slip ring is installed on the crankshaft of the motor and rotates together with the coil (electromagnet). Based on this structure, for example, when there is a coil in the position in the figure, by adjusting the position of the conductive slip ring, the current flows, so that the magnetic pole of the electromagnet becomes the magnetic pole as shown in the figure. This creates a counterclockwise force in the coil, which causes the motor to spin. Next, let's look at what happens when the coil is rotated into position. In this position, if the polarity of the electromagnet remains the same, the coil will stop, so the polarity of the electromagnet needs to be changed in this position. Fine-tune the position of the conductive slip ring, so that the connection between the brush and the slip ring is just reversed at this position, so that the motor can keep rotating. However, if you look closely, you'll notice difficulties with this structure. For example, it is actually very difficult to switch electrodes at exactly the right point in time, and if there is a problem with electrode switching at this point, the motor will stall. Also, contact between a conductive slip ring and two brushes could cause a short circuit between the positive and negative poles, causing failure. To solve these problems, the designers came up with a structure that uses three coils and arranges electromagnets at intervals of 120 degrees. Motors of this construction are known as "three-phase motors" and are the motors in the examples. Incidentally, a motor consisting of one electromagnet is called a "single-phase motor". The previous "three electromagnets" diagram is a schematic diagram of the structure of a three-phase motor. There are three coils, one end of each coil is connected with the conductive slip ring, and the other end connects the three coils. Through such a wiring method, the brushes are used to apply voltage to the two conductive slip rings, so that the two coils are magnetized. In this way, for example, at the position, the A coil and the B coil are magnetized, and at the position, the B coil which becomes the N pole at is demagnetized, and the C coil becomes the N pole. If it works like this, the situation in the "one electromagnet" diagram will not appear. Moreover, with this conductive slip ring configuration, there will be no short circuit between the positive and negative poles. To sum up, the motor achieves rotation by switching the polarity of the electromagnet at the appropriate point in time. Key takeaways from this article
In a broad sense, a "mortor" is a power device, and the "motor" mentioned here refers to an "electric motor" that converts electrical energy into mechanical energy.
It can be said that a motor is a device that uses electrical energy to form an electromagnet, and uses the interaction (attraction and repulsion) of the magnets to generate mechanical energy.
A motor achieves rotation by switching the polarity of an electromagnet at the appropriate point in time.
A single-phase motor with only one electromagnet will cause problems, so a three-phase motor structure with, for example, three electromagnets can achieve stable rotation.
By adopting a three-phase motor structure composed of three electromagnets, it is possible to solve the magnetic pole switching time point problem of a single-phase motor with only one electromagnet, and to achieve stable rotation.




























 XINDA
XINDA