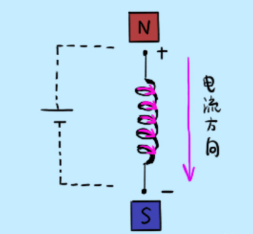
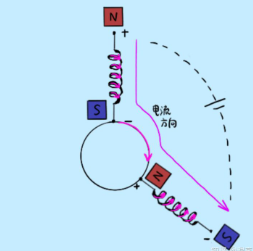
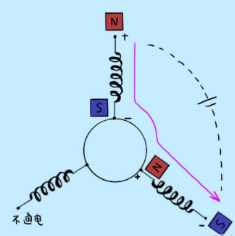
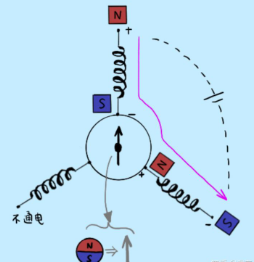
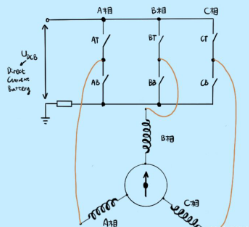
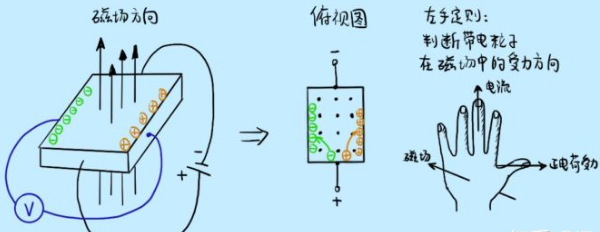
Brushless DC motor, the English abbreviation is BLDC (Brushless Direct Current Motor). The stator of the motor is a coil, or winding. The rotor is a permanent magnet, which is a magnet. According to the position of the rotor, the microcontroller is used to control the energization of each coil, so that the magnetic field generated by the coil changes, thereby constantly attracting the rotor in front to make the rotor rotate. This is the rotation principle of the brushless DC motor. Let’s take a closer look.Structure of a brushless DC motor First, let's talk about the most basic coil. As shown in the figure below, the coil can be understood as something that grows like a spring. According to the right-hand spiral rule learned in junior high school, when the current flows from the top to the bottom of the coil, the polarity of the top of the coil is N, and the polarity of the bottom is S. Now make another coil like this. Then play with the position. In this way, if current passes through it, it will act like there are two electromagnets. If you make one more, you can form the three-phase winding of the motor. Coupled with the rotor made of permanent magnets, it is a brushless DC motor. Current commutation circuit of brushless DC motor The reason why the brushless DC motor uses only DC power and no brushes is that there is an external circuit to control the power supply of each coil. The main component of this current commutation circuit is FET (Field-Effect Transistor ) . FET can be regarded as a switch. The figure below marks FET as AT (Top of A phase), AB (Bottom of A phase), BT, BB, CT, CB. The "opening and closing" of FET is controlled by a single-chip microcomputer . Confirm rotor position using Hall sensor Hall sensors can detect changes in magnetic field intensity through the Hall Effect. According to the left-hand rule learned in high school physics (used to determine the direction of force on a charged conductor in a magnetic field), in the circuit where the Hall sensor is located, the magnetic field deflects the movement of charged particles, and the charged particles "hit" the Hall A potential difference occurs on both sides of the sensor. At this time, a voltmeter can be connected to both sides of the Hall sensor to detect this voltage change, thereby detecting the change in magnetic field strength. The principle is shown in the figure below. The relationship between electrical angle and mechanical angle Although it is a bit strange to insert such a little knowledge here, I still think it is necessary because I felt that it was not easy to understand when I was learning it. It may be easier to understand with the example of Hall sensor here. The mechanical angle is the actual angle through which the motor rotor rotates. The relationship between electrical angle and mechanical angle is related to the number of pole pairs of the rotor.
电气角度 = 极对数 x 机械角度
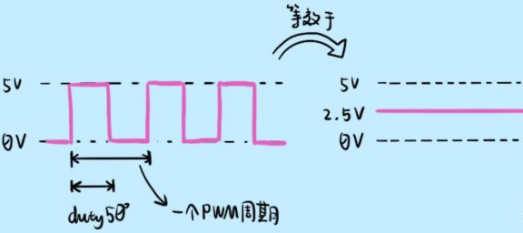
Because the magnetic field generated by the coil actually attracts the magnetic poles of the rotor. So for the rotation control of the motor, we only care about the electrical angle.How to control the speed of brushless DC motor? The greater the voltage across the coil, the greater the current passing through the coil, the stronger the magnetic field generated, and the faster the rotor rotates. Because the connected power supply is DC, we usually use PWM ( Pulse Width Modulation , pulse width modulation) to control the voltage across the coil. The simple principle of PWM is as follows. Therefore, when the brushless DC motor is energized, the PWM generated by the microcontroller is used to continuously control the opening and closing of the FET, which can make the coil repeatedly in the state of power on and off, power on and off. When the energization time is long (duty is large), the equivalent voltage at both ends of the coil is large, the magnetic field intensity generated is strong, and the rotor rotates quickly; when the energization time is short (duty is small), the equivalent voltage across the coil is small, and the magnetic field intensity generated is If it is weak, the rotor will rotate slowly. Articles : Detailed explanation of the configuration and application of PWM in STM32 . The PWM waveform is connected to the Gate of the FET to control the opening and closing of the FET. Assume that when the voltage on the Gate is high, the FET is closed and conducting; when the voltage on the Gate is low, the FET is open and no power is supplied. Moreover, the upper and lower FETs on the same phase must be controlled by anti-phase PWM waveforms to prevent the upper and lower FETs from being turned on at the same time, causing the current to not pass through the motor but be the same in the upper and lower parts, resulting in a short circuit. There are three key points for brushless DC motors:
The commutation sequence of the coil winding current. The commutation sequence of the current determines the direction of rotation of the magnetic field generated by the coil, and thus the direction of rotation of the rotor.
Hall sensors or other means to estimate the position of the permanent magnet rotor to determine when the current reverses direction
Use the PWM waveform generated by the microcontroller to control the energization time of the motor winding to control the speed of the rotor rotation.



























 XINDA
XINDA