


























Underwater Submersible Special Motor B96A1M
Underwater vehicles, also known as unmanned underwater vehicles (UUVs), are devices that travel underwater without human pilots and rely on remote control or automatic control. They are also called "diving robots" or "underwater robots." In the past, underwater robots were expensive and were mostly used in industry, but as the popularity of underwater entertainment continues to rise, underwater robots have quietly become popular among diving enthusiasts and fishing enthusiasts in Europe and the United States.
.png)
Divers use their weight to change the inclination of the device and control the direction of movement. With it, for the first time, people can move flexibly in the water like fish, whether on the surface or in deep water.
Power propulsion is one of the key technologies for underwater submersibles. Shaftless propulsion technology integrates the propulsion motor with the propeller. The motor can be in contact with seawater and has good heat dissipation effect. At the same time, it effectively saves the inner cavity space of the submersible and can be widely used in surface and underwater power propulsion systems. The propulsion motor, thruster, steering gear and rudder, and the tail shell of the submersible are integrated into an integrated tail section, which has the characteristics of low noise, light weight and small size. It is suitable for underwater long-range, low-speed, and large-displacement unmanned submersibles. The propulsion motor is the key technology of shaftless propulsion. The US Navy has carried out a number of related studies and has carried out prototype tests on large unmanned submersibles. This has been demonstrated and verified by the full system at sea in 2016.
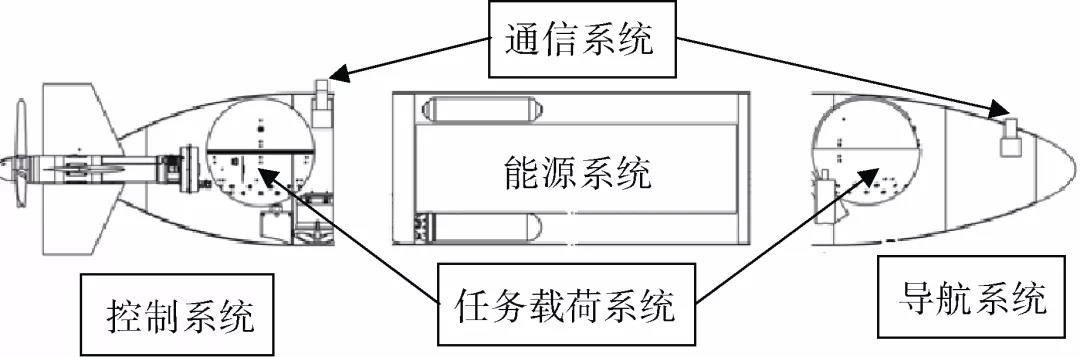
As an underwater vehicle (UUV), energy, autonomous control, navigation, communication and mission payload are the five most critical systems of UUV (see the figure below). Energy is the heart, autonomous control is the brain, navigation and communication are the senses, and mission payload is the operating tool.
B96A1M motor for underwater submersibles features: high power, high torque, peak power up to 4KW; FOC sine wave sensorless control.
From the perspective of the energy system, the motor B96A1M consumes less energy. The current working range of underwater submersibles is greatly affected by the power energy. The endurance determines their working range, and the energy efficiency determines their power performance. The current speed is generally low, generally within 10 knots, and the working range is relatively small, and the working time is short, which are all limited by the power performance. Because of its low energy consumption, this motor can be used with energy batteries with high power generation efficiency to improve the power performance of underwater submersibles, thereby improving endurance.
In terms of communication, the motor B96A1M can cooperate with hydroacoustic communication to transmit underwater data to the surface in time. Hydroacoustic communication is a wireless communication method. Its working distance depends on the carrier frequency and transmission power of the equipment used. Its transmission speed is relatively low, and the distance of information transmission is also very limited. At the same time, hydroacoustic communication is also greatly affected by the environment. the motor adopts FOC sine wave sensorless control, which can cooperate with hydroacoustic communication to complete the signal feedback of underwater submersible performance. Alleviate the safety problem of long-distance transmission.
In addition to shining in underwater submersibles, the motor B96A1M can also be used in automotive parts, industrial equipment power units, medical equipment power units, power tools, etc.
 XINDA
XINDA